
Блок управления эпхх, Схема блока управления ЭПХХ
просмотров 13 793 Google+Блок управления ЭПХХ 50.3761
Для управления клапаном ЭПХХ в карбюраторных двигателях автомобилей ВАЗ 2108 — 2110 используется блок управления ЭПХХ 50.3761. В качестве датчика положения дроссельной заслонки используется датчик-винт, представляющий из себя пластмассовый винт с металлическим наконечником, вкручивающийся в кронштейн, закреплённый на карбюраторе.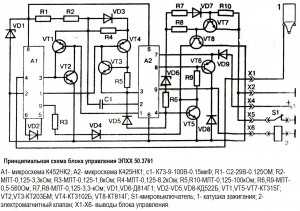
На вывод 3 блока управления подходит провод, соединяющий его с выводом первичной катушки зажигания, передающий импульсы, которые поступают на вывод 4 микросхемы А1. На выводе 3 микросхемы формируются импульсы постоянной длительности, повторение которых соответствует импульсам от трамблёра. Транзисторы VT1 и VT2 разряжают времязадающий конденсатор С1. Если частота вращения коленвала меньше 1100 об./мин., то напряжение на конденсаторе не поднимается, при повышении числа оборотов напряжение возрастает и когда оно превысит 8 В, происходит открытие транзисторов VT3 и VT4 которые через микросхему А2 открывают транзистор VT6 и соответственно VT8.
Блока управления ЭПХХ 25.3761
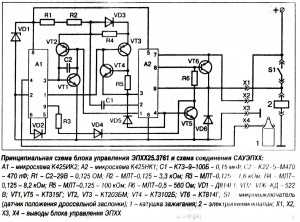
Схема блока управления ЭПХХ 25.3761 отличается в основном только работой при оборотах коленчатого вала более 1100 об./мин. Это обусловлено применением в качестве датчика положения дроссельной заслонки микропереключателя, подающего питание на электропневматический клапан при открытой заслонке. Работа блока управления на холостом ходу идентична блоку 50.3761.
Блок ЭПХХ 1402.3733.
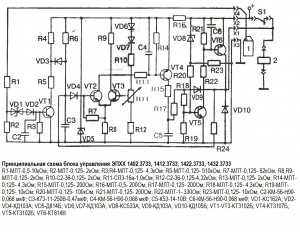
Блок ЭПХХ 1402.3733 устанавливается на автомобили семейства ГАЗ и УАЗ. Принцип его работы такая же как и блока 50,3761. Отличие блоков только в схеме.
 Неисправность блока управления ЭПХХ.
Неисправность блока управления ЭПХХ.
 Неисправность блока управления ЭПХХ.
Неисправность блока управления ЭПХХ.При неисправности блока ЭПХХ двигатель не будет работать на холостом ходу или при отпущенной педали газа, обороты скачут от 900 до 1200. Для поиска неисправности достаточно просто удалить сердечник на клапане или соединить трубки на карбюраторе помимо «баллончика».
«Если Вы заметили ошибку в тексте, пожалуйста выделите это место мышкой и нажмите CТRL+ENTER»
admin 19/06/2011″Если статья была Вам полезна, поделитесь ссылкой на неё в соцсетях»
avtolektron.ru
Блок управления электродвигателем швейной машины
категория
Электроника в быту
материалы в категории
Н. ШУКОВ, г. Гомель, Беларусь
Радио, 2002 год, № 9
Бытовые швейные машины нередко электрифицируют, устанавливая коллекторный двигатель МШ-2, питаемый от сети переменного тока 220 В, 50 Гц. Управление этим двигателем с помощью штатной педали ненадежно, кроме того, ее не всегда удается приобрести. В предлагаемой конструкции применена самодельная педаль, снабженная оптическим датчиком положения, причем резкое нажатие на нее вызывает форсированный разгон двигателя. Заданная педалью частота вращения не изменяется под характерной для швейных машин переменной нагрузкой на вал двигателя. Имеется возможность ограничить максимальную частоту, причем порог ограничения можно регулировать в процессе шитья.
Схема блока управления
Для увеличения кликните по изображению (откроется в новом окне)
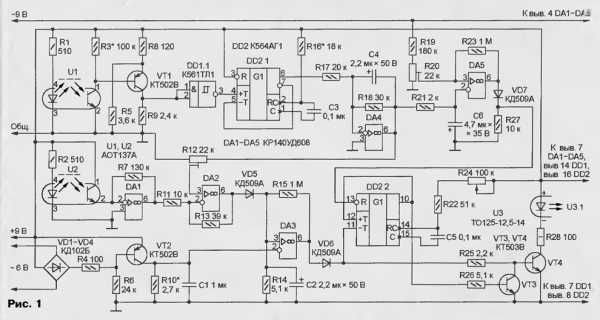
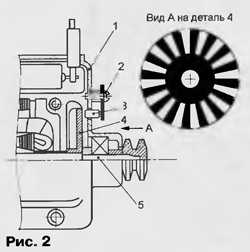
Схема блока управления (без силовых узлов) изображена на рис. 1. Датчиком частоты вращения вала двигателя служит оптрон с открытым оптическим каналом U1, сигналы которого усиливают и формируют транзистор VT1 и триггер Шмитта DD1.1. Как показано на рис. 2, на корпусе 1 электродвигателя закреплена винтом 2 небольшая плата. Установленный на ней оптрон 3 входит в специально просверленное отверстие корпуса 1. Оптическое окно оптро-на должно находиться на расстоянии 1…2 мм от насаженной на вал 5 крыльчатки вентилятора 4. На обращенную к оптрону поверхность крыльчатки нанесена маска (см. рис. 2, вид А на деталь 4). Ее рисуют черной и белой красками. Можно также, зачернив поверхность, наклеить на нее полоски фольги. Корректировкой положения оптрона относительно крыльчатки и подборкой номинала резистора R3 добиваются максимального размаха импульсов на коллекторе транзистора VT1 при вращении вала двигателя.
Всего на маске 16 светлых секторов, в результате за один оборот вала на вход одновибратора DD2.1 поступают 16 импульсов. В ответ на каждый из них одновибратор генерирует импульс фиксированной амплитуды и длительности, поэтому постоянная составляющая напряжения на выходе одновибратора пропорциональна частоте вращения. Усиленная и отфильтрованная каскадом на ОУ DA4 постоянная составляющая служит сигналом обратной связи в системе стабилизации частоты вращения. Крутизну зависимости напряжения от частоты устанавливают подстроечным резистором R12.
Конструкция педали показана на рис. 3.
Ее подвижная часть 2 и неподвижное основание 1 соединены пружиной 3, противодействующей нажатию Оптрон 4 (U2 аналогичный U1, см. рис. 1) размещен на основании 1. В зависимости от расстояния от оптрона 4 до отражателя 5, установленного на подвижной части 2, изменяется количество излученного светодиодом оптрона 4 света, вернувшегося к чувствительной поверхности его фототранзистора В результате изменяется ток фототранзистора. Каскад на микросхеме DA1 преобразует ток в напряжение. Номинал резистора R7 выбран таким, что полному ходу педали соответствует изменение напряжения на выходе DA1 от 0 приблизительно до -8 В.
ОУ DA2 — элемент сравнения и усилитель сигнала ошибки системы стабилизации. На его входы поступают сигналы, пропорциональные скорости вращения и положению педали, а выходное напряжение через диод VD5 подано на вход 3 ОУ DA3, служащего компаратором.
Вход 3 компаратора соединен с генератором пилообразного напряжения, состоящего из диодного моста VD1— VD4 и каскада на транзисторе VT2. На мост подано пониженное до 6 В сетевое напряжение. В моменты перехода сетевого напряжения через ноль, когда все диоды моста закрыты, а транзистор VT2 открыт током, текущим через резистор R6, конденсатор С1 заряжается почти до напряжения питания В остальную часть каждого полупериода мгновенное значение сетевого напряжения отличается от нуля, поэтому выпрямленное мостом положительное напряжение, поступая на базу транзистора VT2, удерживает последний в закрытом состоянии. Конденсатор С1 разряжается через резистор R10 Подборкой номинала этого резистора добиваются, чтобы напряжение на конденсаторе не опускалось ниже приблизительно 0,2 В. Иначе вал двигателя будет продолжать вращаться и при отпущенной педали.
Спады импульсов на выходе DA3 совпадают с моментами переходов сетевого напряжения через ноль, а положение фронтов на оси времени зависит от напряжения на выходе ОУ DA2. Через диод \/D6 и резистор R25 импульсы поступают на базу транзистора VT4, в коллекторной цепи которого находятся светодиод оптотиристора U3.1 и ограничительный резистор R28.
На рис. 4 показана схема силовой части блока управления, нумерация ее элементов продолжает начатую на рис. 1.
Тиристор U3.2 в диагонали моста VD8 открывается в каждом полупериоде с началом светового импульса, создаваемого светодиодом U3.1. На электродвигатель М1, включенный во вторую диагональ моста VD8, поступает сетевое напряжение. Тем, что открывающий тиристор световой импульс продолжается до конца полупериода, предотвращают преждевременные (до окончания полупериода) закрывания тиристора из-за свойственных коллекторным двигателям кратковременных нарушений контакта в щеточном узле.
Вернемся к рис. 1. Кроме узлов, рассмотренных выше, в устройстве имеется ограничитель среднего значения напряжения, подаваемого на двигатель. Ограничитель состоит из одновибратора DD2.2 и транзисторного ключа VT3. Спад каждого управляющего импульса (совпадающий по времени с нулевым мгновенным значением сетевого напряжения) запускает одновибратор DD2.2, импульсы которого открывают транзистор VT3. В результате транзистор VT4, а с ним и оптотиристор U3 не могут открыться, пока импульс одновибратора не закончится. За счет этого среднее напряжение на двигателе не может превысить значения, зависящего от положения движка переменного резистора R24.
Практика показала, что нередко при слишком низком пороге ограничения двигатель не может стартовать под нагрузкой, хотя нормально работает после предварительного разгона. В связи с этим обстоятельством предусмотрен узел принудительного отключения ограничителя, собранный на ОУ DA5. Пока напряжение на выводе 6 DA4, пропорциональное частоте вращения, по абсолютной величине меньше порога, установленного подстроечным резистором R20, напряжение на выходе DA5 — отрицательное, диод VD7 закрыт и низкий логический уровень напряжения на входе R одновибратора DD2.2 запрещает работу последнего, позволяя двигателю уверенно стартовать. С ростом частоты вращения низкий уровень на входе R DD2.2 сменяется высоким, разрешая работу одновибратора.
Блок можно питать от любого стабилизированного источника с выходными напряжениями +9 и -9 В, способного отдавать ток не менее 100 мА по цепи положительного напряжения и 30 мА — отрицательного. Переменное напряжение 6 В подают на диодный мост VD1—VD4 от отдельной вторичной обмотки сетевого трансформатора. Если такой обмотки нет, можно воспользоваться дополнительным понижающим трансформатором, дающим нужное напряжение.
В блоке использованы постоянные резисторы МЛТ, переменный R24 — СП-1; подстроечные R12, R20 — СПО-0,15. Конденсаторы С1, СЗ, С5 — металлопленочные, С7 — МБГЧ, оксидные С2, С4, С6 — К50-35. Транзисторы КТ502В можно заменить на КТ502А, КТ502Д, КТ502Е, КТ361Б, КТ361В, КТ361Г, а КТ503В — на КТ503А, КТ503Д, КТ503Е, КТ315Б, КТ315В, КТ315П. Вместо микросхемы К564АГ1 подойдет ее зарубежный аналог CD4098B, вместо КР140УД608 — К140УД6, К140УД7, КР140УД708. Диодный мост КЦ405Б можно заменить на КЦ402А, КЦ403А, КЦ403Б, КЦ403В, диоды КД509А — на КД503А, КД510А, КД518А.
Ненагруженный двигатель МШ-2 при номинальном питающем напряжении может развить очень высокую скорость (до 20000 мин-1). Поэтому желательно, чтобы во время налаживания блока управления двигатель был механически нагружен приводом швейной машины, работающей вхолостую (без ткани и ниток). Для швейных машин большинства типов максимальная частота вращения вала двигателя в этих условиях — приблизительно 3000 мин-1, что соответствует частоте повторения импульсов одновибратора DD2.1800 Гц.
Длительность этих импульсов должна составлять 0,8 мс. Если при максимальной частоте вращения вала двигателя входит в насыщение ОУ DA4, длительность нужно уменьшить. Ее корректируют подборкой номинала резистора R16. Длительность импульсов одновибратора DD2.2 должна с помощью переменного резистора R24 изменяться в интервале 2…6 мс.
Нажав на педаль до упора и перемещая движок подстроенного резистора R12 слева (по схеме) направо, установите его в положение, начиная с которого частота вращения вала двигателя уменьшается. Подстроенный резистор R20 регулируют по наиболее уверенному пуску двигателя под нагрузкой.
Если налаживать блок управления приходится с ненагруженным двигателем, обороты последнего можно уменьшить до необходимых 3000 с
radio-uchebnik.ru
Блок управления двигателем :: SYL.ru
Любое современное техническое устройство, содержащее движущиеся рабочие органы, имеет в своем составе блок управления. Непосредственными движителями (исполнительными механизмами) этих органов являются приводы, представляющие собой устройства различной природы: электрические, электромагнитные, гидравлические, пневматические и т. д. Задачей упомянутого блока является целенаправленное воздействие на них с целью изменения характеристик движения рабочих органов: их скорости, угла поворота, положения и пр.
Электронный блок управления системой автомобиля
В автотехнике этот общий термин применяется для электронных схем, отвечающих за работу систем автомобиля и конструктивно выполненных в виде отдельных блоков. При этом каждый из них может отвечать за один или несколько агрегатов. Так, в автомобилях можно встретить электронный модуль управления трансмиссией (англ. PCM). Это, как правило, комбинированное устройство, содержащее схемы контроля двигателя (англ. ECU) и (коробки) передачи (англ. TCU). Таким образом, PCM представляет собой конструктивно объединенный блок управления системами автомобиля. Но в некоторых моделях авто, например фирмы «Крайслер», обе эти схемы (ECU и TCU) конструктивно обособлены.

Встречаются также аналогичные устройства для тормозов, дверей, сидений, аккумулятора и т. д. Некоторые современные авто содержат до 80 таких схем. При этом каждую из них можно определить как отдельный, функционально (а иногда и конструктивно) обособленный электронный блок управления. С точки зрения схемотехники большинство из них представляют собой высоконадежные встраиваемые микроконтроллеры. Общей же тенденцией автомобилестроения является объединение всех таких устройств в общую электронную систему автомобиля с центральным компьютером.
Блок управления двигателем (ECU) автомобиля
В самом общем смысле это — устройство для формирования воздействий на ряд исполнительных органов, изменяющих параметры режимов работы двигателя внутреннего сгорания (ДВС) с целью их оптимизации. Критерием оптимизации обычно выступает расход топлива. требуемый для реализации движения с заданной скоростью при имеющейся нагрузке.
ECU обеспечивает выполнение следующих действий:
• считывание значений из большого количества датчиков внутри моторного отсека,
• интерпретации данных с использованием многомерных карт производительности (так называемых справочных таблиц),
• корректирования состояния исполнительных элементов на двигателе согласно справочным таблицам.
Где находится блок управления ECU? На фото ниже показано типовое место его расположения под приборной панелью автомобиля.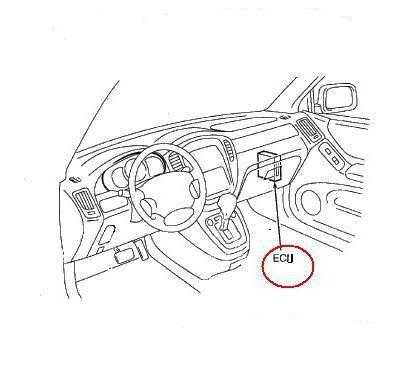
Что из себя представляет микропроцессор ECU
Современный ECU может содержать 32-битный, 40-МГц микропроцессор. Это может показаться не слишком быстродействующим устройством по сравнению с процессором 500-1000 МГц, который вы, вероятно, имеете в своем ПК, но помните, что микропроцессор ECU работает с гораздо меньшим объемом памяти, составляющим в среднем ECU менее 1 мегабайта. В вашем же ПК, по крайней мере, 2 гигабайта оперативной памяти — это в 2000 раз больше.
Схема блока управления конструктивно выполнена в виде электронного модуля с чипом микропроцессора и сотнями других компонентов на многослойной печатной плате. Этот модуль закрепляется в общем корпусе вместе с блоком питания, а все электрические контакты выводятся на внешний электрический разъем. Так выглядит электронный модуль ECU (см. на фото ниже).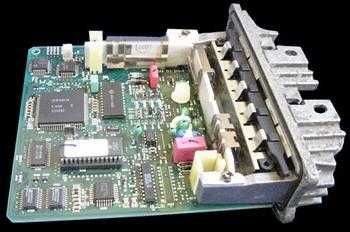
Другие электронные компоненты ECU
Аналого-цифровые преобразователи (АЦП) – это устройства для ввода в микропроцессор сигналов автомобильных датчиков, например датчика содержания кислорода. Его выходной сигнал является напряжением, непрерывно изменяющимся в диапазоне от 0 до 1,1 В. Микропроцессор понимает только цифровой код, поэтому АЦП преобразует сигнал датчика в 10-битовый двоичный код.
- Выходные ключевые схемы. Блок управления двигателем зажигает свечи цилиндров, включает клапаны форсунок инжекторной системы подачи топлива, задействует вентилятор радиатора охлаждающей жидкости. Цепи управления этими устройствами подключены к выходным ключам ECU. Такой ключ либо открыт для протекания тока, либо закрыт – промежуточного состояния он не имеет. Например, выходной ключ вентилятора может коммутировать ток 0,5 А при напряжении 12 В на реле включения вентилятора. Сигнал небольшой мощности на выводе чипа микропроцессора открывает транзистор выходного ключа ECU, что позволяет включить уже электромагнитное реле вентилятора, коммутирующее ток его электродвигателя, достигающий нескольких ампер.
- Цифро-аналоговые преобразователи (ЦАП). Иногда ECU должен предоставить аналоговое выходное напряжение для управления некоторыми исполнительными устройствами. Поскольку микропроцессор ECU является цифровым устройством, то оно должно иметь ЦАП, преобразующий цифровой код в аналоговое напряжение.
- Формирователи сигналов. Иногда входные или выходные сигналы должны быть изменены по величине перед их преобразованием. Например, АЦП может иметь диапазон входных сигналов от 0 до 6 В, а сигнал датчика — находиться в диапазоне от 0 до 1,5 В. Формирователь сигнала для АЦП умножит напряжение этого датчика, на 4, и на выходе его получится сигнал в диапазоне 0-6 В, который уже может быть прочитан и преобразован АЦП более точно.

Ниже мы раскроем содержание отдельных функций ECU.
Управление приборной панелью
Приборы на ней отображают текущее состояние различных систем авто. Эта информация поступает на индикацию после использования соответствующими блоками управления. Так, из ECU подается значение температуры охладителя двигателя и частота вращения его коленвала. Блок управления передачей (TCU) оперирует величиной скорости движения. Блок, управляющий тормозами, имеет информацию о их состоянии.
Все эти модули просто выставляют свои данные на общую для них шину передачи данных, с которой их считывает центральный микропроцессор, например в ECU. Он же периодически выставляет на ту же шину пакеты информации, состоящие из заголовков и данных. Заголовок определяет назначение данных пакета: либо на индикатор скорости, либо на индикатор температуры, а сами данные и есть величины для индикации. Приборная панель содержит другой модуль, который знает, как искать определенные пакеты — всякий раз, когда он обнаруживает их, обновляет соответствующий датчик или индикатор с новым значением.

Большинство автопроизводителей покупают приборные панели уже полностью собранными, от поставщиков, которые их разрабатывают и изготавливают.
ECU инжекторных двигателей
Система питания современных двигателей внутреннего сгорания — как бензиновых, так и дизельных – строится по принципу прямого впрыскивания топлива. Основным ее исполнительным устройством является впрыскиватель, инжектор. В отличие от карбюраторной системы, инжектор впрыскивает топливо непосредственно в цилиндры или впускной коллектор к воздушному потоку с помощью одной или нескольких механических или электрических форсунок.
Сегодня форсунками руководит микропроцессор ECU инжекторного двигателя. Принцип работы такой системы основывается на том, что решение о моменте и продолжительности открытия электромагнитных клапанов форсунок принимается на основании сигналов, поступающих от многих датчиков.
Управление соотношением «воздух-топливо»
Для инжекторного двигателя ECU определяет количество впрыскиваемого топлива на основе анализа ряда параметров. Если датчик положения дроссельной заслонки показывает, что педаль газа нажимается все дальше, то датчик массового расхода измеряет количество дополнительного воздуха, всасываемого в двигатель, а ECU рассчитывает и вводит соответствующее количество топлива в двигатель. Если датчик температуры охлаждающей жидкости двигателя показывает, что последний не прогрет, то впрыск топлива будет увеличиваться, пока двигатель не прогреется. Контроль ECU топливо-воздушной смеси на карбюраторном двигателе работает аналогично, но по сигналам датчика положения поплавка карбюратора.
Управление углом опережения зажигания
Двигатель с искровым зажиганием требует искры, чтобы инициировать горение в камере сгорания. ECU может настраивать точное время зажигания искры в такте сжатия (так называемое опережение зажигания), чтобы обеспечить ему оптимальный режим работы. Если он обнаруживает, что двигатель стучит, т. е. имеет место детонация – состояние, которое потенциально разрушительно для двигателя, и определяет его как результат слишком раннего зажигания, то оно задерживается. Поскольку детонация, как правило, возникает на низких оборотах, ECU может отправить сигнал для АКПП на понижение передаточного отношения в первой попытке его прекратить.
Как управляются стекла в вашем авто
Задумывались ли вы, какой механизм поднимает и опускает окна вашего автомобиля вверх и вниз? И как должен работать блок управления стеклоподъемниками?
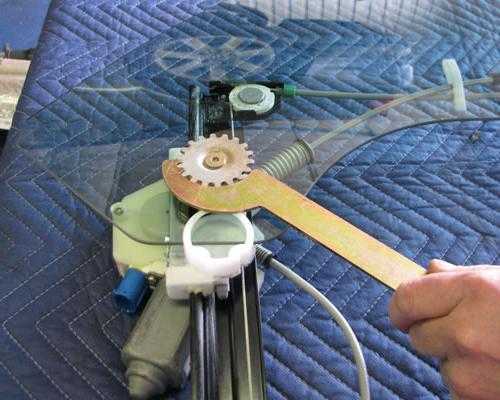
Механизм подъема устроен так: небольшой электродвигатель крепится к червячной передаче, после которое установлены еще несколько других зубчатых колес, чтобы достичь большого передаточного числа. За счет этого маломощный исполнительный двигатель создает достаточный крутящий момент для поднятия окна.
В современных автомобилях цепи управления двигателей стеклоподъемников всех дверей заведены в специальный электронный блок управления стеклоподъемниками. Он обычно совмещает в себе также функции управления положением зеркал и дверных замков.
В некоторых автомобилях управление всеми этими функциями плюс управление положением сидений совмещено в одном блоке, называемом «блоком контроля тела».
Вентилятор радиатора двигателя: как он управляется?
Электрический вентилятор радиатора двигателя автомобиля включается либо в замок зажигания (и тогда он работает, пока двигатель работает), либо в блок управления вентилятором с термостатическим выключателем.
Термостат не включает вентилятор до тех пор, пока охлаждающая двигатель жидкость не нагреется выше ее нормальной рабочей температуры. Отключает же его термостат, когда она снова охладится. Интервалы включения/выключения блок управления вентилятором формирует в зависимости от сигнала с датчика температуры охладителя.
Что обеспечивает тепло в салоне?
Все машины оборудованы обогревателем салона (в просторечии печкой), который предназначен для использования тепла от двигателя, вдуваемого затем в салон.
После прогрева двигателя и соответствующего подогрева охлаждающей жидкости она передается в обогреватель, представляющий собой небольшой радиатор. Когда воздух над ним прогревается от протекающей по трубкам обогревателя жидкости, он нагнетается в салон небольшим вентилятором.
Управление обогревателем регулируются либо ручным способом, при котором водитель просто включает/выключает вентилятор подачи теплого воздуха в салон, либо автоматическим управлением, в котором задействован отдельный блок управления печкой, или же система климат-контроля автомобиля под управлением центрального компьютера.
Исполнительным органом при всех способах управления остается вентилятор подачи теплого воздуха, хотя в некоторых моделях автомобилей используется и клапан управления нагревателем, который останавливает ток охлаждающей жидкости в обогреватель, когда он не используется. Обогреватели сидений используют электронагревательные элементы, а не охлаждающую жидкость двигателя для достижения эффекта нагрева.
Несколько слов о бытовой технике
Многочисленные изделия бытовой техники имеют встроенные электроприводы, приводящие в движение их рабочие органы: ножи мясорубок и чопперов, различные насадки кухонных комбайнов и миксеров, активаторы стиральных машин. Здесь же можно вспомнить и различные ручные электроинструменты. В большинстве случаев эти изделия оснащены электродвигателями постоянного тока, которые допускают простой способ регулирования их частоты вращения при помощи переменных резисторов, подвижные контакты которых выводятся на органы управления.
Исключением из этого правила являются современные стиральные машины. Они оснащаются, как правило, бесконтактными (в отличие от двигателей постоянного тока) однофазными асинхронными двигателями. Поскольку частота вращения такого двигателя определяется частотой тока в питающей электросети, то для ее изменения используется специальный электронный блок управления стиральной машины.
По сути, он представляет собой частотный электропривод. Его задачей является питание обмотки статора приводного электродвигателя током такой частоты, при котором скорость вращения двигателя (и активатора) соответствовали бы заданному режиму. Так, при полоскании белья нужна минимальная скорость вращения, а при его отжиме — максимальная.
В большинстве современных домохозяйств стиральные машины используются весьма интенсивно. Поэтому частым видом их неисправности является выход из строя какого-либо элемента управляющей схемы. После чего следует неизбежная замена блока управления.
www.syl.ru
Блок управления 25.3761 ВАЗ 2105 (ВАЗ 2104)
«http://www.w3.org/TR/xhtml1/DTD/xhtml1-transitional.dtd»>
Блок управления 25.3761 ВАЗ 2105 (ВАЗ 2104)Руководство по ремонту ВАЗ 2105 ремонт и эксплуатация ВАЗ-2104 и 2105 |
|
2105vaz.ru
Блок управления двигателем постоянного тока / Блог им. Sayron / Блоги по электронике
В настоящее время двигатели постоянного тока нашли широкое применение в различных отраслях промышленности. Двигатели постоянного тока используются там, где требуется плавное и точное регулирование скорости и вращающего момента в широких пределах. В этой статье я расскажу о создании блока управления для двигателя постоянного тока, который позволял бы изменять частоту вращения вала двигателя и стабилизировал обороты на определенном уровне, вне зависимости от нагрузки на валу двигателя.В основе разработки положен принцип работы следящего привода с одноконтурной системой регулирования.
Блок управления состоит из следующих узлов:
— СИФУ (Система Импульсно — Фазового Управления)
— Регулятор
— Защита
Принципиальная схема привода приведена ниже.
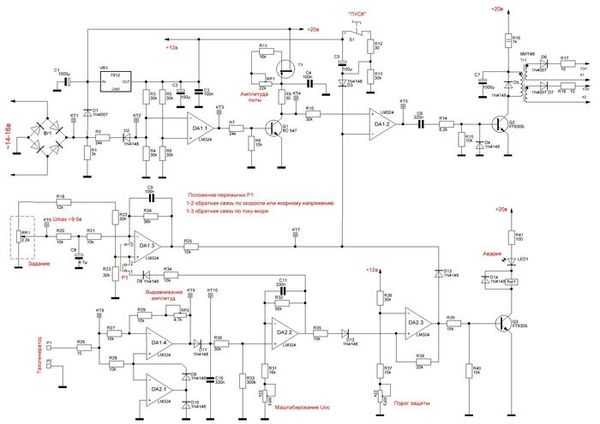
Крупнее
Рассмотрим схему поподробнее.
Итак, СИФУ (Система Импульсно — Фазового Управления) — преобразует синусоидальное напряжение сети в серию прямоугольных импульсов, идущих на управляющие электроды силовых тиристоров. При включении блока управления переменное напряжение величиной 14-16в поступает на мостовой выпрямитель D1, где преобразуется в пульсирующее напряжение, служащее не только для питания схемы, но и для синхронизации работы привода. Диод D2 препятствует сглаживанию импульсов конденсатором С1. Далее импульсы поступают на «детектор нуля» — DA1.1, собранного на одном ОУ микросхемы LM324, работающего в режиме компаратора. Пока нет импульса, напряжения на прямом и инверсном входах примерно равны и компаратор находиться в сбалансированном состоянии. При прохождении фазы через «0», на инверсном входе компаратора DA1.1 играющего роль «детектора нуля» появляются импульсы, переключающие компаратор, в результате чего на выходе DA1.1 вырабатываются прямоугольные синхроимпульсы, период следования которых жестко привязан к похождению фазы через «0».
Ниже представлены осциллограммы, поясняющие принцип работы.
Сверху вниз: КТ1, КТ2, КТ3.
Схема была просимулированна в программе Multisim 11. Вот файл проекта. Можно скачать, запустить и посмотреть как работает данный узел.
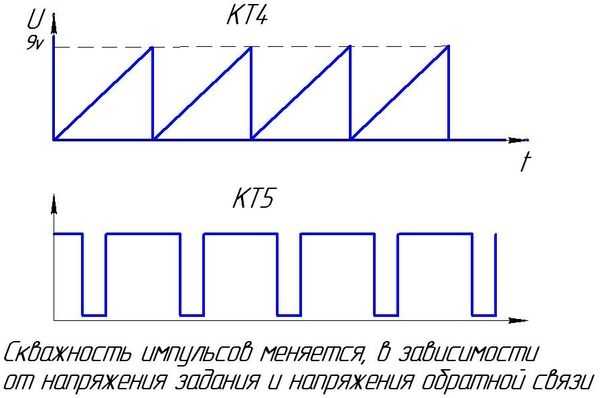
Далее синхроимпульсы поступают на интегратор с транзисторным ключом (С4, Q1), где и вырабатывается пилообразное напряжение. В момент прохождения фазы через «0» синхроимпульс открывает транзистор Q1, который разряжает конденсатор С4. После спада импульса транзистор закрывается и происходит заряд конденсатора до прихода следующего синхроимпульса, в результате чего на коллекторе Q1 (осцил. КТ4). формируется линейно нарастающее пилообразное напряжение, стабилизированное генератором стабильного тока выполненного на полевом транзисторе T1. Амплитуда „пилы“ равное 9в выставляется подстроечным резистором RP1. Напряжение „пилы“ поступает на прямой вход компаратора DA1.2.
Напряжение задания поступает на инверсный вход компаратора DA1.2 и в момент, когда пилообразное напряжение превышает величину напряжения на инверсном входе компаратора, компаратор переключиться и на выходе компаратора формируется импульс (осцил. КТ4). Импульс дифференцируется через цепочку R14, C6 и поступает на базу транзистора Q2. Транзистор открывается и на импульсном трансформаторе Tr1 формируются импульсы открытия силовых тиристоров. Увеличивая (уменьшая) напряжение задания, меняется скважность импульсов в КТ5.
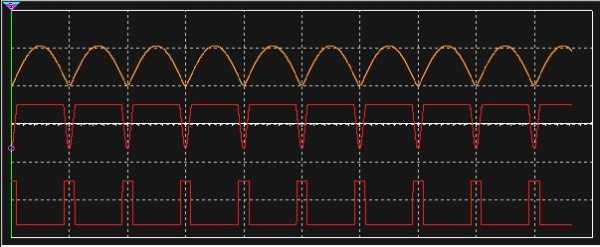
Вот осциллограммы.
Но никаких импульсов в КТ5 мы не увидим до тех пор, пока не нажмем кнопку „Пуск“ — S1. Когда кнопка не нажата, напряжение питания +12в через нормально замкнутые контакты S1 по цепочке R12, D3 поступает на инверсный вход DA1.2 и равно около 11в. Так как это напряжение превышает напряжение „пилы“ равное 9в, компаратор запирается, и управляющие импульсы открытия тиристоров не формируются. Для предотвращения аварии и выхода из строя двигателя, в случае если оператор не вывел на «0» регулятор оборотов, в схеме предусмотрен узел разгона C5, R13 служащий для плавного разгона двигателя. В режиме «Пуск», схема работает следующим образом: при нажатии кнопки «Пуск» нормально закрытые контакты размыкаются и конденсатор С5 по цепочке — «земля», R13, — С5 начинает плавно заряжаться и напряжение на отрицательной обкладке конденсатора плавно стремиться к нулю. Одновременно, напряжение на инвертирующем входе DA1.2 плавно возрастает до величины, определяемой напряжением задания, и компаратор начинает вырабатывать управляющие импульсы силовых тиристоров. Время заряда определяется номиналами C5, R13. Если в процессе работы двигателя необходимо изменить его обороты, чтобы избежать резких бросков оборотов — в схеме предусмотрен узел «разгона — торможения» R21, C8, R22. При увеличении (уменьшении) напряжения задания, конденсатор С8 плавно заряжается (разряжается) что предотвращает резкий «наброс» напряжения на инверсном входе усилителя и как следствие предотвращает резкий бросок оборотов двигателя.
Теперь рассмотрим принцип работы регулятора оборотов.
Регулятор предназначен для поддержания постоянных оборотов двигателя в зоне регули-рования. Регулятор представляет собой дифференциальный усилитель с суммированием двух напряжений: напряжения задания и напряжения обратной связи. Напряжение задания задается резистором RP1 и поступает через фильтр R20, C8, R21, выполняющий одновременно функции узла «разгона — торможения», поступает на инверсный вход регулятора ОУ DA1.3. При увеличении напряжения задания на выходе ОУ DA1.3 линейно уменьшается выходное напряжение.
Выходное напряжение регулятора поступает на инверсный вход компаратора СИФУ DA1.2 где, суммируясь с импульсами пилообразного напряжения, преобразуется в серию прямоугольных импульсов идущих на управляющие электроды тиристоров. При увеличении (уменьшении) напряжения задания увеличивается (уменьшается) и выходное напряжение на выходе силового блока.
На этом графике представлена зависимость оборотов двигателя от напряжения задания.
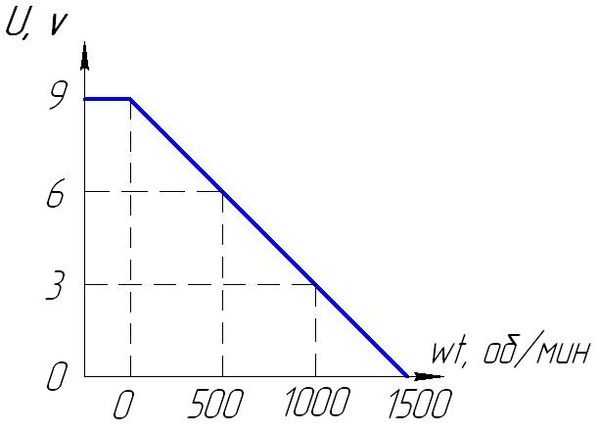
Значения оборотов двигателя даны для примера.
Делитель напряжения R22, R23 включенный на прямой вход регулятора DA1.3 служит для предотвращения аварии двигателя при обрыве обратной связи (при обрыве обратной связи двигатель идет в разнос).
При включении привода, тахогенератор начинает вырабатывать напряжение, пропорциональное оборотам двигателя. Это напряжение поступает на вход прецизионного детектора DA1.4, DA2.1 собранного по двухполупериодной схеме. Напряжение, снимаемое с выхода точного детектора DA1.4, DA2.1, поступает через фильтр C10, R30, R33 на масштабирующий усилитель обратной связи DA2.2. Усилитель служит для подгонки напряжения обратной связи поступающего с тахогенератора. Напряжение с выхода ОУ DA2.2. поступает как на вход регулятора DA1.3 так и на схему защиты DA2.3.
Резистором RP1 задаются обороты двигателя. При работе двигателя без нагрузки, напряжение на выходе масштабирующего усилителя ниже напряжения на выводе 6 ОУ DA1.3. ≈ +5v, поэтому привод работает как регулятор. При увеличении нагрузки на валу двигателя, уменьшается напряжение, получаемое с тахогенератора и как следствие уменьшение напряжения с выхода, масштабирующего усилителя.
Когда это напряжение будет меньше напряжение на выводе 5 ОУ DA1.3 привод входит в зону стабилизации тока. Уменьшение напряжения на неинвертирующем входе ОУ DA1.3 приводит к уменьшению напряжения на его выходе, а так как он работает на инвертирующий усилитель DA1.2, это приводит к большему углу открытия тиристоров и, следовательно, к увеличению напряжения на якоре двигателя.
СХЕМА ЗАЩИТЫ
Защита от превышения оборотов предназначена для защиты двигателя от аварии, в случае резкого превышения установленных оборотов двигателя. Схема собрана на ОУ DА2.3, включенного по схеме компаратора. На инверсный вход компаратора подается опорное напряжение с делителя R36, R37, RP3. Резистором RP3 устанавливается порог срабатывания защиты. Напряжение с выхода масштабирующего усилителя DA2.2 поступает на прямой вход компаратора защиты DA2.3. При превышении оборотов двигателя выше номинальных, напряжение на прямом входе компаратора превышает порог уставки защиты, определяемой RP3 — компаратор переключиться. Благодаря наличию в схеме положительной обратной связи R38 приводит к «за-щелкиванию» компаратора, а наличие диода VD12 препятствует сбросу компаратора. При срабатывании защиты, напряжение с выхода компаратора защиты (≈ +11v) через диод VD14 поступает на инверсный вход 13 DA1.2 СИФУ, а так как напряжение защиты превышает напряжение «пилы» (= 9v) — происходит мгновенный запрет выдачи управляющих импульсов на управляющие электроды тиристоров. Напряжение с выхода компаратора защиты DA2.3 открывает транзистор VT4, что приводит к срабатыванию реле Р1.1 и зажиганию светодиода VL1 сигнализирующего об аварийной ситуации. Снять защиту можно, только полностью обесточив привод, и, выдержав паузу 5 — 10 секунд вновь включив его.
Силовая часть блока управления.
Схема силовой части представлена ниже
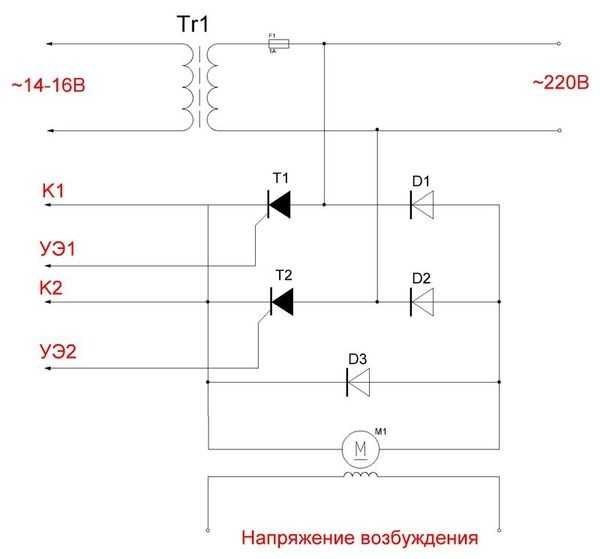
Трансформатор Tr1 предназначен для питания схемы блока управления. Управляемый выпрямитель собран по полумостовой симметричной схеме и содержит два силовых диода D1,D2
и два силовых тиристора Т1, Т2, и защитный диод D3. Обмотка возбуждения питается от своего отдельного трансформатора и выпрямителя.
Если на двигателе отсутствует тахогенератор, то обратную связь, для контроля оборотов, можно выполнить следующим образом:
1. Применить трансформатор тока, включенный в цепь питания управляемого выпрямителя
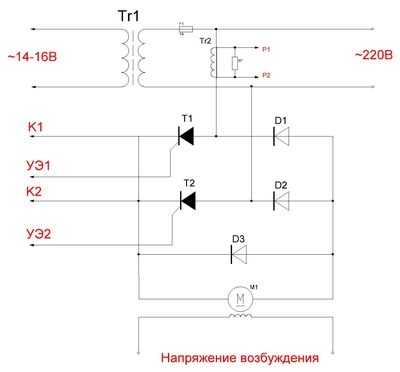
Если используется трансформатор тока, то перемычку P1 на схеме блока управления поставить
в положение 1-3, это необходимо потому, что при увеличении нагрузки ток якоря будет увеличиваться, следовательно напряжение, снимаемое с трансформатора тока тоже будет увеличиваться, поэтому напряжение обратной связи необходимо подавать на инвертирующий
вывод микросхемы DA1.3. Так же можно поставить стандартный токовый шунт, но только в цепь якоря двигателя, после выпрямителя и снимать сигнал обратной связи с него.
2. Использовать датчик якорного напряжения. Схема приведена ниже.
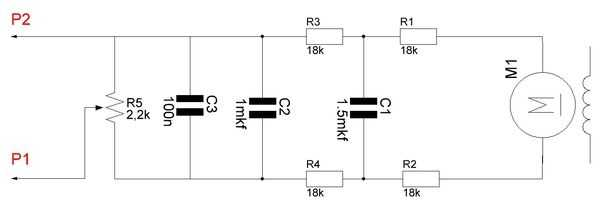
Датчик якорного напряжения представляет собой фильтр – делитель и подключается непосредственно к клеммам якоря электродвигателя. Настройка привода производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Теперь перейдем к конструкции и наладке блока управления.
Блок управления был выполнен на печатной плате (файл печатной платы)
Плата проводом МГТФ соединена с разъемом, для удобства демонтажа при ремонте.
Настройка
На время настройки была собрана силовая часть навесным монтажем, в качестве нагрузки была использована обычная лампа накаливания.

Наладку начинаем с проверки напряжений питания и напряжения питания на операционных усилителях DA1, DA2. Микросхемы желательно ставить в панельки. Потом контролируем осциллограммы в контрольных точках КТ1, КТ2, КТ3 (осциллограммы в этих точках приведены в начале описания СИФУ). Теперь, осциллограф ставим в контрольную точку КТ4. Должны быть пилообразные импульсы, как на осиллограмме выше (кнопка «Пуск» в этот момент должна быть разомкнута). Подстроечным резистором RP1 необходимо выставить размах «пилы» равным 9 вольт, это очень важный момент, так как от него зависит дальнейшая работа схемы. Так как разброс параметров полевых транзисторов бывает весьма значительный, возможно диапазона регулировки RP1 может не хватить, тогда подбором номинала резистора R10 добиться нужного размаха. В контрольной точке КТ3 длительность импульса должна быть 1.5 — 1.8ms, если нет, то подбором резистора R4 (в сторону уменьшения) добиться необходимой длительности.
Вращая регулятор RR1 в контрольной точке КТ5 проконтролировать изменение скважности импульсов от максимума до полного их исчезновения при нижнем положении движка RR1. При этом должна изменятся яркость лампочки подключенной к силовому блоку.
Далее подключаем блок управления к двигателю и тахогенератору. Выставляем регулятором RR1
напряжение на якоре около 40-50 вольт. Резистор RP3 должен быть установлен в среднее положение. Контролируя напряжение на якоре двигателя, начинаем вращать резистор RP3. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь. Для желающих поэкспериментировать: для увеличения жесткости привода можно также увеличить сопротивление R24, увеличив тем самым коэффициент усиления регулятора либо увеличить резистор R32.
Если используется обратная связь по току якоря двигателя.
Для этого, как говорилось выше, необходим трансформатор тока, включенный в цепь питания
управляемого выпрямителя. Схема калибровки трансформатора тока дана ниже. Подбором резистора получить на выходе трансформатора переменное напряжение ≈ 2 ÷ 2.5v. Мощность нагрузки RN1 должна соответствовать мощности двигателя.
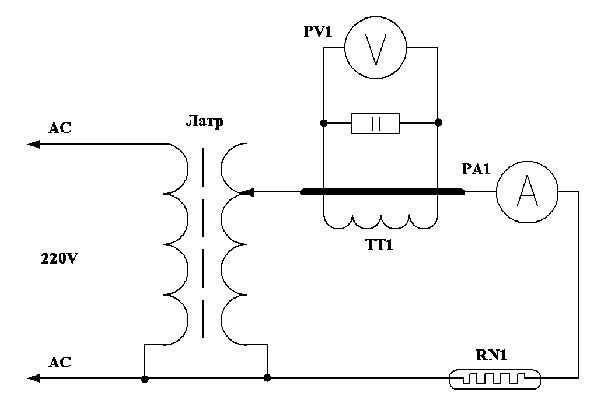
Внимание! Трансформатор тока без нагрузочного резистора не включать.
Подключаем трансформатор тока к цепи обратной связи P1 и P2. На время настройки «Регулятора» желательно выпаять диод D12, чтобы исключить ложное срабатывание защиты.
Осциллограммы в контрольных точках КТ8, КТ9, КТ10 должны быть как на рисунке ниже.
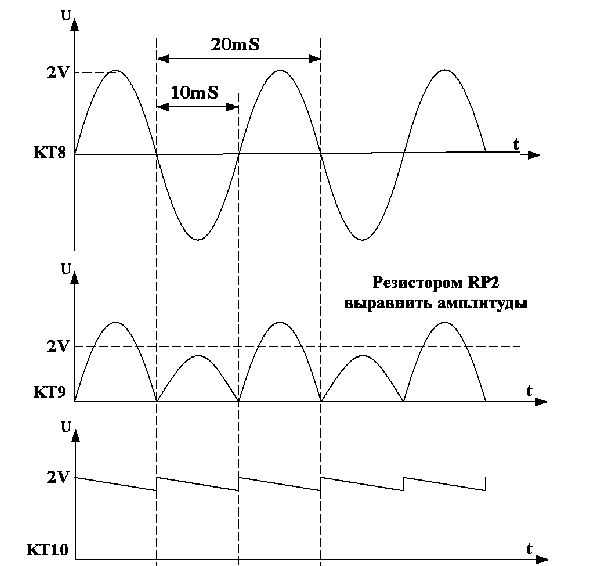
Дальнейшая настройка такая же как и в случае с использования тахогенератора.
Если используется обратная связь по напряжению якоря двигателя.
Как отмечалось выше, можно применить обратную связь по якорному напряжению, для этого собирается датчик якорного напряжения. Настройка блока управления производиться следующим образом. Резисторы “Задание” и “Масштабирование Uoc” выставляется в среднее положение. Резистор R5 датчика якорного напряжения выводиться в нижнее к “земле” положение. Включаем привод и выставляем напряжение на якоре двигателя примерно 110 вольт. Контролируя напряжение на якоре двигателя, начинаем вращать резистор R5. В определенный момент регулирования напряжение на якоре начнет снижаться, это свидетельствует о том, что начала работать обратная связь.
Данный блок управления изготавливался для расточного станка. Вот фото этого монстра


На этом станке вышел из строя электромашинный усилитель, который и управлял двигателем постоянного тока перемещения стола.
Вот такой электромашинный усилитель.

Заместо него и делался данный блок управления.
Вот фото самого двигателя постоянного тока.

Блок управления был собран на изоляциоонном основани, где размещены все основные элементы.

Силовые диоды и тиристоры установлены на теплоотводы. Так же была сделана панель с разъемами, куда были выведены сигналы с контрольных точек схемы. Это делалось для удобство настройки и ремонта непосредственно на станке.
Вот смонтированный блок управления в силовом шкафу станка


На другой стороне силового шкафа был установлен маленький пульт управления.

На нем расположены:
-тумблер включения блока
-тумблер режима работы. Так как для установочных перемещений стола станка, точный контроль и стабилизация оборотов не нужны, то на это время цепь обратной связи шунтируется.
-ручки регулировки количества оборотов. Было поставлено два переменных резистора, один для грубой регулировки, второй — многооборотный — для точной установки нужных оборотов при черновой и чистовой расточке детали.
Кому интересно, ниже представлено видео работы станка. Сперва, показывается расточка отверстия в стальной плите толщиной 20мм. Потом показывается с какой частотой вращается винт подачи стола станка. С этой скорость подается деталь на резец, а такую частоту вращения подающего винта обеспечивает двигатель постоянного тока, для которого, собственно, все это и делалось.
Блок управления показал себя хорошо, сбоев и аварий не было.
Схемы и перечень элементов
electronics-lab.ru
Электронный блок управления двигателя (ECU)
Поскольку сложность систем автомобиля в последнее время значительно возросла, также увеличился объем информации, сохраняемой в памяти ECU. Ранние версии программируемой системы зажигания, созданной компанией Rover, достигали точности в выборе времени зажигания ±1,8″, тогда как обычный распределитель обеспечивает точность ±8″. Информация, полученная в ходе стендовых, а также ходовых испытаний транспортного средства, сохраняется в постоянной памяти ROM. Основная карта выбора момента зажигания состоит из установок правильного опережения зажигания для 16 значений скорости и 16 значений условий нагрузки. Это показано на рисунке в виде трехмерной модели.
Рис. Трехмерная карта выбора момента зажигания, хранящаяся в ECU
Чтобы иметь набор установок для восьми скоростей и восьми температурных участков, используется отдельная трехмерная модель. Она применяется для ввода поправок к основным установкам на температуру охлаждающей жидкости двигателя. Это улучшает ходовые качества автомобиля и может применяться для ускорения прогрева двигателя. Данные также подвергаются дополнительной корректировке по нагрузке при температурах ниже 70 «С. На рисунке показана логическая блок-схема выбора оптимальной установки угла зажигания. Отметим, что для обеспечения постоянной энергии искры ECU также вводит коррекцию и по углу активации как функции частоты вращения двигателя, и по изменению напряжения батареи. Сниженное напряжение батареи требует увеличенного времени активации, повышенное напряжение — уменьшенного времени.
Рис. Блок-схема вычисления угла опережения зажигания
Типичная для большинства «компьютерных» систем блок-схема, показанная на рисунке, описывает блок управления программным зажиганием. Входные сигналы обрабатываются, и полученные данные сохраняются в оперативной памяти RAM.
Рис. Типичная для большинства «компьютерных» систем блок-схема управления для программного зажигания
Программа и значения установочных данных заранее занесены в ROM. В этих системах для выполнения команд, требуемых в соответствии с программой, используется микроконтроллер. Информация, поступающая от датчиков, преобразуется в цифровую форму в схеме АЦП. Компания Rover, как и многие другие изготовители, использует бортовой датчик давления, состоящий из анероидной камеры и тензодатчиков, измеряющих нагрузку на двигатель.
Блок-схема, используемая для представления программы, занесенной в ROM блока управления двигателем, показана на рисунке.
ustroistvo-avtomobilya.ru
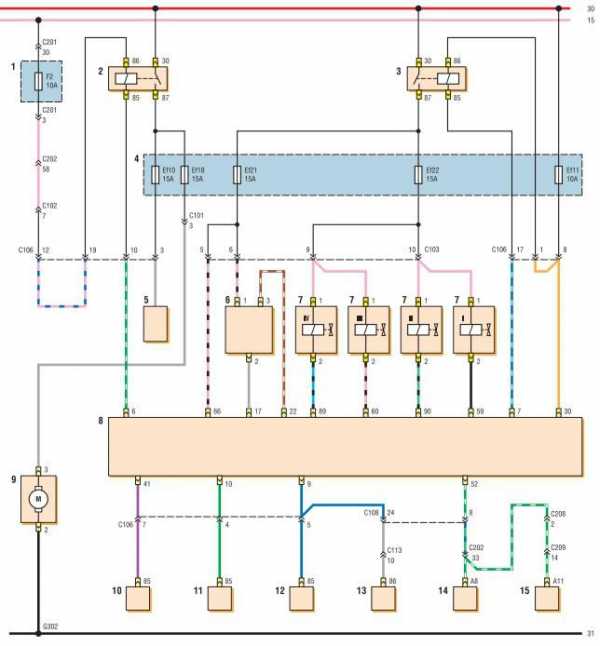
| Номер | Bosch M1.5.4 (1411020 и 1411020-70) Январь 5.1.1 (71) | Bosch M1.5.4 (40/60) Январь-5.1 (41/61) Январь 5.1.2 (71) | Bosch MP7.0 |
| 1 | Зажигание 1-4 цилиндра. | Зажигание 1-4 цилиндра. | Зажигание 1-4 цилиндра. |
| 2 | . | Массовый провод зажигания. | . |
| 3 | Реле топливного насоса | Реле топливного насоса | Реле топливного насоса |
| 4 | Шаговый двигатель PXX(A) | Шаговый двигатель PXX(A) | Шаговый двигатель PXX(A) |
| 5 | Клапан продувки адсорбера. | Клапан продувки адсорбера. | |
| 6 | Реле вентилятора системы охлаждения | Реле вентилятора системы охлаждения | Реле вентилятора левого (только на Нивах) |
| 7 | Входной сигнал датчика расхода воздуха | Входной сигнал датчика расхода воздуха | Входной сигнал датчика расхода воздуха |
| 8 | . | Входной сигнал датчика фазы | Входной сигнал датчика фазы |
| 9 | Датчик скорости | Датчик скорости | Датчик скорости |
| 10 | . | Общий. Масса датчика кислорода | Масса датчика кислорода |
| 11 | Датчик детонации | Датчик детонации | Вход 1 датчика детонации |
| 12 | Питание датчиков. +5 | Питание датчиков. +5 | Питание датчиков. +5 |
| 13 | L-line | L-line | L-line |
| 14 | Масса форсунок | Масса форсунок | Масса форсунок. Силовая «земля» |
| 15 | Управление форсунками 1-4 | Нагреватель датчика кислорода | Лампа CheckEngine |
| 16 | . | Форсунка 2 | Форсунка 3 |
| 17 | . | Клапан рециркуляции | Форсунка 1 |
| 18 | Питание +12В неотключаемое | Питание +12В неотключаемое | Питание +12В неотключаемое |
| 19 | Общий провод. Масса электроники | Общий провод. Масса электроники | Общий провод. Масса электроники |
| 20 | Зажигание 2-3 цилиндра | Зажигание 2-3 цилиндра | |
| 21 | Шаговый двигатель PXX(С) | Шаговый двигатель PXX(С) | Зажигание 2-3 цилиндра |
| 22 | Лампа CheckEngine | Лампа CheckEngine | Шаговый двигатель PXX(B) |
| 23 | . | Форсунка 1 | Реле кондиционера |
| 24 | Масса шагового двигателя | Масса выходных каскадов шагового двигателя | Силовое заземление |
| 25 | Реле кондиционера | Реле кондиционера | . |
| 26 | Шаговый двигатель PXX(B) | Шаговый двигатель PXX(B) | Масса датчиков ДПДЗ, ДТОЖ, ДМР |
| 27 | Клемма 15 замка зажигания | Клемма 15 замка зажигания | Клемма 15 замка зажигания |
| 28 | . | Входной сигнал датчика кислорода | Входной сигнал датчика кислорода |
| 29 | Шаговый двигатель PXX(D) | Шаговый двигатель PXX(D) | Входной сигнал датчика кислорода 2 |
| 30 | Масса датчиков ДМРВ, ДТОЖ, ДПДЗ, ДД, ДПКВ | Масса датчиков ДМРВ, ДТОЖ, ДПДЗ, ДД, ДПКВ | Вход 2 датчика детонации |
| 31 | . | Резервный выход сильноточный | Входной сигнал датчика неровной дороги |
| 32 | . | . | Сигнал расхода топлива |
| 33 | Управление форсунками 2-3 | Нагреватель датчика кислорода. | . |
| 34 | . | Форсунка 4 | Форсунка 4 |
| 35 | . | Форсунка 3 | Форсунка 2 |
| 36 | . | Выход. Клапан управления длиной впускной трубы. | Главное реле |
| 37 | Питание. +12В после главного реле | Питание. +12В после главного реле | Питание. +12В после главного реле |
| 38 | . | Резервный выход слаботочный | . |
| 39 | . | . | Шаговый двигатель РХХ (С) |
| 40 | . | Резервный вход дискретный высокий | . |
| 41 | Запрос включения кондиционера | Запрос включения кондиционера | Нагреватель датчика кислорода 2 |
| 42 | . | Резервный вход дискретный низкий | . |
| 43 | Сигнал на тахометр | Сигнал на тахометр | Сигнал на тахометр |
| 44 | СО — потенциометр | Датчик температуры воздуха | . |
| 45 | Датчик температуры охлаждающей жидкости | Датчик температуры охлаждающей жидкости | Датчик температуры охлаждающей жидкости |
| 46 | Главное реле | Главное реле | Реле вентилятора охлаждения |
| 47 | Разрешение программирования | Разрешение программирования | Вход сигнала запроса включения кондиционера |
| 48 | Датчик положения коленвала. Низкий уровень | Датчик положения коленвала. Низкий уровень | Датчик положения коленвала. Низкий уровень |
| 49 | Датчик положения коленвала.Высокий уровень | Датчик положения коленвала.Высокий уровень | Датчик положения коленвала.Высокий уровень |
| 50 | . | Датчик положения клапана рециркуляции | Разрешение программирования |
| 51 | . | Запрос на включение гидроусилителя руля | Нагреватель ДК |
| 52 | . | Резервный вход дискретный низкий | . |
| 53 | Датчик положения дроссельной заслонки | Датчик положения дроссельной заслонки | Датчик положения дроссельной заслонки |
| 54 | Сигнал расхода топлива | Сигнал расхода топлива | Шаговый двигатель РХХ (D) |
| 55 | K-line | K-line | K-line |
2shemi.ru